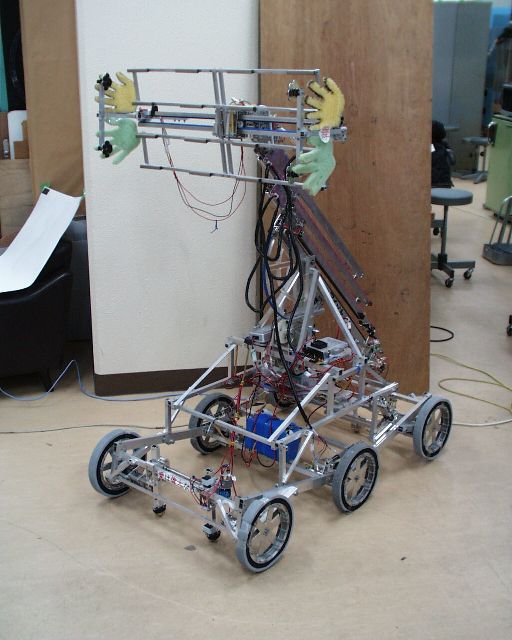
写真1 マシン全景
2.1 足回り
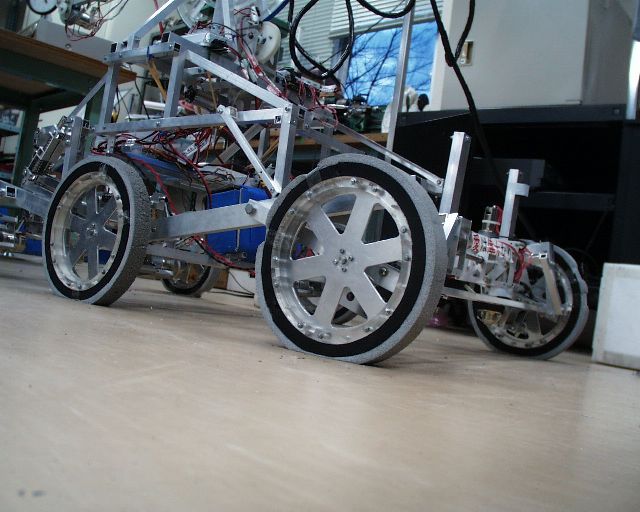
足回りは、階段を登ることを前提に考えた。これは、ロボコン大賞の獲得も視野に入れていたためで、それには階段の昇降は必須だと考えたためである。 この足回りの基本構造は、大学で研究されていた不整地走行車のものである。それを今回の競技フィールドの階段用に特化した。 足回りのフレームは中央で折れ曲がる形になっており、これにより、階段を昇降する際のマシン上部の揺れを軽減している。 階段を昇降する際はタイヤを6輪とも回転させる。段を登る際、壁面をタイヤが駆け登る形になるので、タイヤには摩擦の大きい滑り止めをはっている。 タイヤの間隔も階段にあわせてあり、前・中・後のいずれかが側面に接している時、他の4輪は水平面に有り、接している2輪を側面に押し付ける形となっている。 平地を走行する際は中央の2輪で走行する。2輪にする時は、写真2に示すように、キャスタで前後輪をジャッキアップして浮かせている。中央の2輪で走行するので、旋回性が非常によくなっている。
写真2a 階段を上るとき
写真2b 平地で

2.2 アーム、ハンド部
写真3にアーム、ハンド部の全景を示す。アームには、半丸形状の大きなギヤが取り付けられており、それを回転させて上下方向に向きを変えることが出来る。 四段構成のアームは最大2.5m伸びる。テニスラケットのガットで四段のアームを連動させて伸ばしている。写真4に伸びた状態のアームを示す。これにより、接地禁止ゾーンの外からのオブジェ貼り付けを行う。 ハンド部は上下二段で4個ずつ持つことができ、最大8個のオブジェを保持することが出来る。ハンドの開閉動作は、ラックとピニオン機構により行う。ベアリングの多用によりスムーズに開閉することができ、8個のオブジェを保持することが出来る(写真5)。ハンド部の付け根に関節を設けてあり、ハンド部も上下方向に向きを変えることが出来る。進入禁止ゾーンから第一、第三円盤の側面にもオブジェを貼り付けることが出来る。
写真3 アーム、ハンド部全国大会に向けての改良点 地区大会終了後、課題としてオブジェの取り込みの高速化が挙げられた。特に問題となっていたのがハンド部の開閉で、地区大会仕様のものはウォームギアを使用していたため大変遅かった。しかし全国大会仕様では、モータの強化により保持トルクが増し、モータを直結させることにより高速化を図った。さらに、オブジェをつかむと、その時点で自動的に挟み込むのを止めるように改良した。このため、オブジェの取り込みが地区大会のときより格段に早くなった 足回りでは、オブジェ台や円盤前でマシンの向きの微調整をし易いように、マイコンのプログラムで低速/高速駆動の切り替えを出来るようにした 。
写真4 伸びる伸びる

