ロボコン2005「大運動会」マシン紹介
ここではロボコン2005「大運動会」で、S-kenが製作したマシン「鶴鶴鶴鶴鶴鶴鶴」について紹介していきます。
鶴鶴鶴について 鶴鶴鶴鶴について
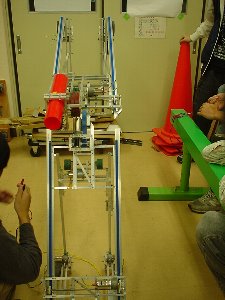
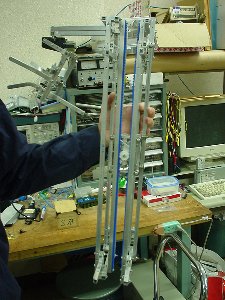
手動マシン「鶴鶴鶴」
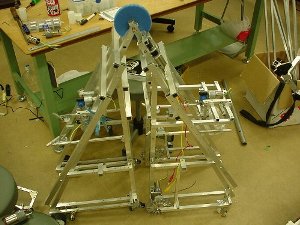
プロトタイプの鶴鶴鶴です。これは、ごく初期にもう一つ案の出ていた手動マシンと
どちらのアイデアを採用するかを決める際に作成されました。
当時大量に余っていたカクカンを使用したため、必要以上に頑丈な作りになっています。

こちらがもう一つ案の出ていた手動マシンです。
3つの足で各障害物をクリアする、というコンセプトでした。

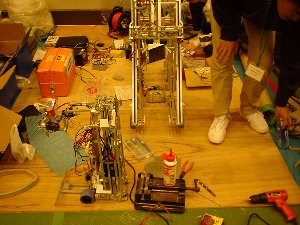
手動マシン試作2号機です。これはバッテリー側です。
横にあるのは試作1号機です。

手動マシン試作1号機に搭載されていたいかついタイヤです。
このトゲで梯子の段差を超えるものでした。
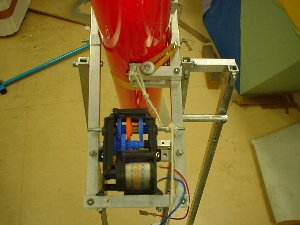
手動マシン試作1号機のバトン機構です。
下側のモーターが回って、糸を巻き取り、バトンを落とす機構です。
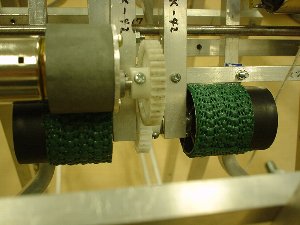
平均台を走行するためのタイヤです。マシンの真ん中のほうにあります。

ギヤ部分に木の軸を使っていたので、折れました。
軽量化と強度の確保は両立が大変です。
orz

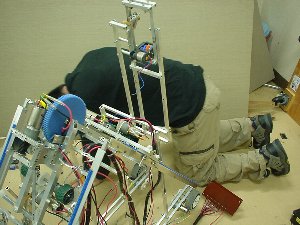
走行試験中です。電源チェック!!
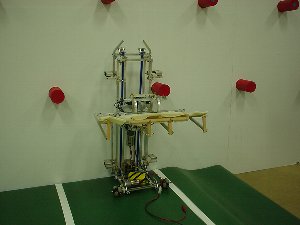
マシン前部を持ち上げる試験中です。
ひっくり返らないこと希望。
近畿地区大会のピットにて。鶴鶴鶴と鶴鶴鶴鶴

地区大会1回戦 スタート

はしごくぐりをクリアしています

地区大会で平均台を降りてます。
まぁ、地区大会だからといって別に変わった降り方をしているわけではないのですが。

地区大会前日ハードル越えのテスト中。

哀れ鶴鶴鶴、改良の為ばらばらに。

平均台の走行機構を調整中。

全国大会に向けて再設計されたバトン機構。
見てのとおり、糸を巻き取ってバトンを落とします。
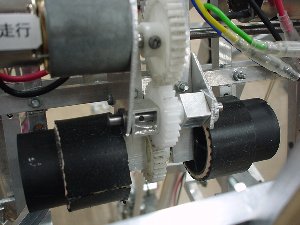
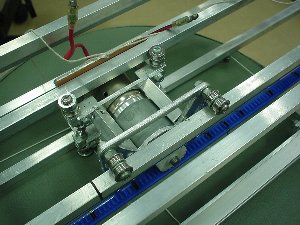
平均台の走行機構はこうなっています。
梯子の段差を越える為の機構です。
梯子をくぐっている時に、ガタッとなるのは、これが折りたたまれるためです。

全国のはしごくぐりクリア!
・・・えぇ。全国だからといってとくにはしごのサイズが違ったりするわけではないですよ。

ハードルを越えているところです。

バトンをこれから渡そうというところ。
自動マシン「鶴鶴鶴鶴」
自動マシンの初期型フレームです。
左側についているのはバトン受け取り機構です。

バトン受け取り機構拡大図

子機の足をたたむ為の糸です。
糸を下向きに引くと軸をガイドとして向きが変わり、足をたたむ仕組みです。
糸が切れたり、絡まったりしてなかなかスムーズには動きませんでした。
子機の中核部分です。
両側フレームのガタをベアリングで押さえつける計画でしたが、うまくいかないのもので。
自動マシンに付けた車輪とフレームです。
通称「速そう」

ほかの部分を引っ掛ける部品なわけですが、見てるとこう書きたくなるわけです。

地区大会でも僅かな時間を惜しんで子機の調整が続いていました。
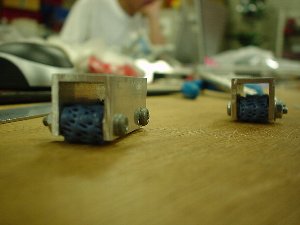
これが全国大会に向けて生まれ変わった「アドバンスド子機」!
・・・じつはそう呼んでるのは一人だけだったり。
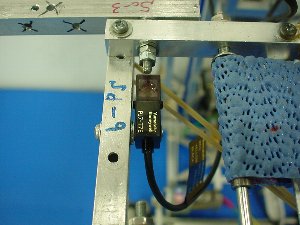
新たにアドバンスド子機に採用された「光学センサー」。
なぜか白のバトンでは上手く動作するのに、赤では正常に動作しない、という不具合が
全国のピットで発見され、急遽ティッシュを貼ったテープを上から貼る、
という応急処置が施されました。
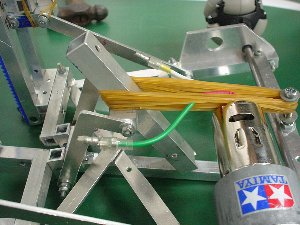
走行中は後ろ体重なマシンを、壁際で前方傾斜にするための足と、それを押さえつける部品です。
ハンパない量の輪ゴムを使用しています。

余りに涙ぐましすぎる軽量化。フレームを鑢掛けしています。
こんなに苦労しても0.1gも減らないのに・・・
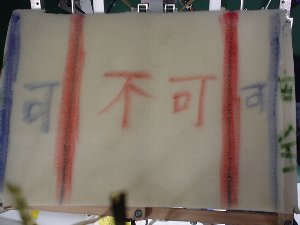
非常に分かりやすいバトン受け取り部分の表記。
不可・可・安全でバトンを受け取られるか否かを表記しています。
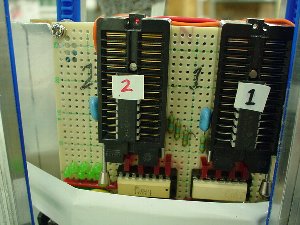
アドバンスド子機に搭載されているPICマイコンです。
紅白で使用するものが違います。
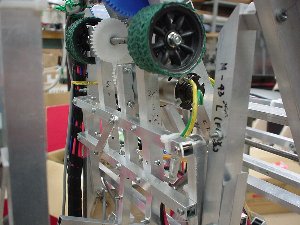
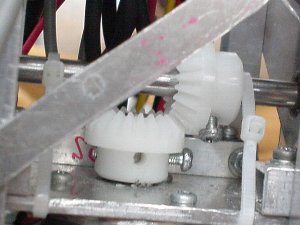
アドバンスド子機の横移動用のギヤです。
その上が壁を登るときに壁と一定の距離を維持するためのベアリングです。
左下のプラ板は壁との接触を判定するスイッチです。
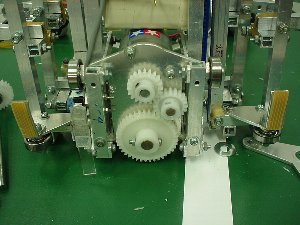
全国のピットで急遽施した修正作業です。
大きな力がギヤにかかると軸がたわんでギヤが逃げてかみ合わなくなることが判明したため、
結束バンドで軸とフレームを固定し、ギヤを強制的にかみ合わせています。